
Taming Transformers for High-Resolution Image Synthesis
 Robin Rombach
3ba01b2416
Merge pull request #190 from carmocca/patch-1
Robin Rombach
3ba01b2416
Merge pull request #190 from carmocca/patch-1
|
2 jaren geleden | |
|---|---|---|
| assets | 2 jaren geleden | |
| configs | 2 jaren geleden | |
| data | 3 jaren geleden | |
| scripts | 2 jaren geleden | |
| taming | 2 jaren geleden | |
| License.txt | 4 jaren geleden | |
| README.md | 2 jaren geleden | |
| environment.yaml | 3 jaren geleden | |
| main.py | 2 jaren geleden | |
| setup.py | 4 jaren geleden |
README.md
Taming Transformers for High-Resolution Image Synthesis
CVPR 2021 (Oral)

Taming Transformers for High-Resolution Image Synthesis
Patrick Esser*,
Robin Rombach*,
Björn Ommer
* equal contribution
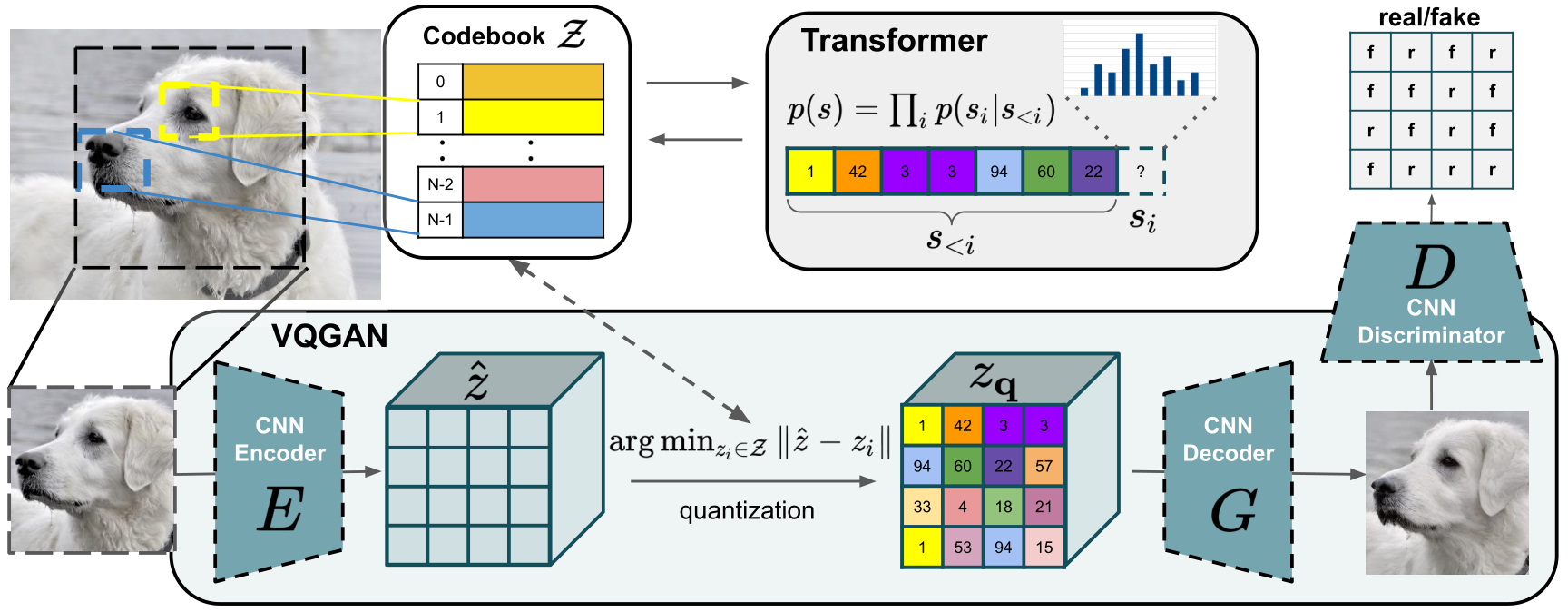
tl;dr We combine the efficiancy of convolutional approaches with the expressivity of transformers by introducing a convolutional VQGAN, which learns a codebook of context-rich visual parts, whose composition is modeled with an autoregressive transformer.
 arXiv | BibTeX | Project Page
arXiv | BibTeX | Project Page
News
2022
- More pretrained VQGANs (e.g. a f8-model with only 256 codebook entries) are available in our new work on Latent Diffusion Models.
Added scene synthesis models as proposed in the paper High-Resolution Complex Scene Synthesis with Transformers, see this section.
2021
Thanks to rom1504 it is now easy to train a VQGAN on your own datasets.
Included a bugfix for the quantizer. For backward compatibility it is disabled by default (which corresponds to always training with
beta=1.0). Uselegacy=Falsein the quantizer config to enable it. Thanks richcmwang and wcshin-git!Our paper received an update: See https://arxiv.org/abs/2012.09841v3 and the corresponding changelog.
Added a pretrained, 1.4B transformer model trained for class-conditional ImageNet synthesis, which obtains state-of-the-art FID scores among autoregressive approaches and outperforms BigGAN.
Added pretrained, unconditional models on FFHQ and CelebA-HQ.
Added accelerated sampling via caching of keys/values in the self-attention operation, used in
scripts/sample_fast.py.Added a checkpoint of a VQGAN trained with f8 compression and Gumbel-Quantization. See also our updated reconstruction notebook.
We added a colab notebook which compares two VQGANs and OpenAI's DALL-E. See also this section.
We now include an overview of pretrained models in Tab.1. We added models for COCO and ADE20k.
The streamlit demo now supports image completions.
We now include a couple of examples from the D-RIN dataset so you can run the D-RIN demo without preparing the dataset first.
You can now jump right into sampling with our Colab quickstart notebook.
Requirements
A suitable conda environment named taming can be created
and activated with:
conda env create -f environment.yaml
conda activate taming
Overview of pretrained models
The following table provides an overview of all models that are currently available. FID scores were evaluated using torch-fidelity. For reference, we also include a link to the recently released autoencoder of the DALL-E model. See the corresponding colab notebook for a comparison and discussion of reconstruction capabilities.
| Dataset | FID vs train | FID vs val | Link | Samples (256x256) | Comments |
|---|---|---|---|---|---|
| FFHQ (f=16) | 9.6 | -- | ffhq_transformer | ffhq_samples | |
| CelebA-HQ (f=16) | 10.2 | -- | celebahq_transformer | celebahq_samples | |
| ADE20K (f=16) | -- | 35.5 | ade20k_transformer | ade20k_samples.zip [2k] | evaluated on val split (2k images) |
| COCO-Stuff (f=16) | -- | 20.4 | coco_transformer | coco_samples.zip [5k] | evaluated on val split (5k images) |
| ImageNet (cIN) (f=16) | 15.98/15.78/6.59/5.88/5.20 | -- | cin_transformer | cin_samples | different decoding hyperparameters |
| FacesHQ (f=16) | -- | -- | faceshq_transformer | ||
| S-FLCKR (f=16) | -- | -- | sflckr | ||
| D-RIN (f=16) | -- | -- | drin_transformer | ||
| VQGAN ImageNet (f=16), 1024 | 10.54 | 7.94 | vqgan_imagenet_f16_1024 | reconstructions | Reconstruction-FIDs. |
| VQGAN ImageNet (f=16), 16384 | 7.41 | 4.98 | vqgan_imagenet_f16_16384 | reconstructions | Reconstruction-FIDs. |
| VQGAN OpenImages (f=8), 256 | -- | 1.49 | https://ommer-lab.com/files/latent-diffusion/vq-f8-n256.zip | --- | Reconstruction-FIDs. Available via latent diffusion. |
| VQGAN OpenImages (f=8), 16384 | -- | 1.14 | https://ommer-lab.com/files/latent-diffusion/vq-f8.zip | --- | Reconstruction-FIDs. Available via latent diffusion |
| VQGAN OpenImages (f=8), 8192, GumbelQuantization | 3.24 | 1.49 | vqgan_gumbel_f8 | --- | Reconstruction-FIDs. |
| DALL-E dVAE (f=8), 8192, GumbelQuantization | 33.88 | 32.01 | https://github.com/openai/DALL-E | reconstructions | Reconstruction-FIDs. |
Running pretrained models
The commands below will start a streamlit demo which supports sampling at
different resolutions and image completions. To run a non-interactive version
of the sampling process, replace streamlit run scripts/sample_conditional.py --
by python scripts/make_samples.py --outdir <path_to_write_samples_to> and
keep the remaining command line arguments.
To sample from unconditional or class-conditional models,
run python scripts/sample_fast.py -r <path/to/config_and_checkpoint>.
We describe below how to use this script to sample from the ImageNet, FFHQ, and CelebA-HQ models,
respectively.
S-FLCKR

You can also run this model in a Colab notebook, which includes all necessary steps to start sampling.
Download the
2020-11-09T13-31-51_sflckr
folder and place it into logs. Then, run
streamlit run scripts/sample_conditional.py -- -r logs/2020-11-09T13-31-51_sflckr/
ImageNet

Download the 2021-04-03T19-39-50_cin_transformer folder and place it into logs. Sampling from the class-conditional ImageNet model does not require any data preparation. To produce 50 samples for each of the 1000 classes of ImageNet, with k=600 for top-k sampling, p=0.92 for nucleus sampling and temperature t=1.0, run
python scripts/sample_fast.py -r logs/2021-04-03T19-39-50_cin_transformer/ -n 50 -k 600 -t 1.0 -p 0.92 --batch_size 25
To restrict the model to certain classes, provide them via the --classes argument, separated by
commas. For example, to sample 50 ostriches, border collies and whiskey jugs, run
python scripts/sample_fast.py -r logs/2021-04-03T19-39-50_cin_transformer/ -n 50 -k 600 -t 1.0 -p 0.92 --batch_size 25 --classes 9,232,901
We recommended to experiment with the autoregressive decoding parameters (top-k, top-p and temperature) for best results.
FFHQ/CelebA-HQ
Download the 2021-04-23T18-19-01_ffhq_transformer and 2021-04-23T18-11-19_celebahq_transformer folders and place them into logs. Again, sampling from these unconditional models does not require any data preparation. To produce 50000 samples, with k=250 for top-k sampling, p=1.0 for nucleus sampling and temperature t=1.0, run
python scripts/sample_fast.py -r logs/2021-04-23T18-19-01_ffhq_transformer/
for FFHQ and
python scripts/sample_fast.py -r logs/2021-04-23T18-11-19_celebahq_transformer/
to sample from the CelebA-HQ model. For both models it can be advantageous to vary the top-k/top-p parameters for sampling.
FacesHQ

Download 2020-11-13T21-41-45_faceshq_transformer and
place it into logs. Follow the data preparation steps for
CelebA-HQ and FFHQ. Run
streamlit run scripts/sample_conditional.py -- -r logs/2020-11-13T21-41-45_faceshq_transformer/
D-RIN

Download 2020-11-20T12-54-32_drin_transformer and
place it into logs. To run the demo on a couple of example depth maps
included in the repository, run
streamlit run scripts/sample_conditional.py -- -r logs/2020-11-20T12-54-32_drin_transformer/ --ignore_base_data data="{target: main.DataModuleFromConfig, params: {batch_size: 1, validation: {target: taming.data.imagenet.DRINExamples}}}"
To run the demo on the complete validation set, first follow the data preparation steps for ImageNet and then run
streamlit run scripts/sample_conditional.py -- -r logs/2020-11-20T12-54-32_drin_transformer/
COCO
Download 2021-01-20T16-04-20_coco_transformer and
place it into logs. To run the demo on a couple of example segmentation maps
included in the repository, run
streamlit run scripts/sample_conditional.py -- -r logs/2021-01-20T16-04-20_coco_transformer/ --ignore_base_data data="{target: main.DataModuleFromConfig, params: {batch_size: 1, validation: {target: taming.data.coco.Examples}}}"
ADE20k
Download 2020-11-20T21-45-44_ade20k_transformer and
place it into logs. To run the demo on a couple of example segmentation maps
included in the repository, run
streamlit run scripts/sample_conditional.py -- -r logs/2020-11-20T21-45-44_ade20k_transformer/ --ignore_base_data data="{target: main.DataModuleFromConfig, params: {batch_size: 1, validation: {target: taming.data.ade20k.Examples}}}"
Scene Image Synthesis
 Scene image generation based on bounding box conditionals as done in our CVPR2021 AI4CC workshop paper High-Resolution Complex Scene Synthesis with Transformers (see talk on workshop page). Supporting the datasets COCO and Open Images.
Scene image generation based on bounding box conditionals as done in our CVPR2021 AI4CC workshop paper High-Resolution Complex Scene Synthesis with Transformers (see talk on workshop page). Supporting the datasets COCO and Open Images.
Training
Download first-stage models COCO-8k-VQGAN for COCO or COCO/Open-Images-8k-VQGAN for Open Images.
Change ckpt_path in data/coco_scene_images_transformer.yaml and data/open_images_scene_images_transformer.yaml to point to the downloaded first-stage models.
Download the full COCO/OI datasets and adapt data_path in the same files, unless working with the 100 files provided for training and validation suits your needs already.
Code can be run with
python main.py --base configs/coco_scene_images_transformer.yaml -t True --gpus 0,
or
python main.py --base configs/open_images_scene_images_transformer.yaml -t True --gpus 0,
Sampling
Train a model as described above or download a pre-trained model:
- Open Images 1 billion parameter model available that trained 100 epochs. On 256x256 pixels, FID 41.48±0.21, SceneFID 14.60±0.15, Inception Score 18.47±0.27. The model was trained with 2d crops of images and is thus well-prepared for the task of generating high-resolution images, e.g. 512x512.
- Open Images distilled version of the above model with 125 million parameters allows for sampling on smaller GPUs (4 GB is enough for sampling 256x256 px images). Model was trained for 60 epochs with 10% soft loss, 90% hard loss. On 256x256 pixels, FID 43.07±0.40, SceneFID 15.93±0.19, Inception Score 17.23±0.11.
- COCO 30 epochs
- COCO 60 epochs (find model statistics for both COCO versions in
assets/coco_scene_images_training.svg)
When downloading a pre-trained model, remember to change ckpt_path in configs/*project.yaml to point to your downloaded first-stage model (see ->Training).
Scene image generation can be run with
python scripts/make_scene_samples.py --outdir=/some/outdir -r /path/to/pretrained/model --resolution=512,512
Training on custom data
Training on your own dataset can be beneficial to get better tokens and hence better images for your domain. Those are the steps to follow to make this work:
- install the repo with
conda env create -f environment.yaml,conda activate tamingandpip install -e . - put your .jpg files in a folder
your_folder - create 2 text files a
xx_train.txtandxx_test.txtthat point to the files in your training and test set respectively (for examplefind $(pwd)/your_folder -name "*.jpg" > train.txt) - adapt
configs/custom_vqgan.yamlto point to these 2 files - run
python main.py --base configs/custom_vqgan.yaml -t True --gpus 0,1to train on two GPUs. Use--gpus 0,(with a trailing comma) to train on a single GPU.
Data Preparation
ImageNet
The code will try to download (through Academic
Torrents) and prepare ImageNet the first time it
is used. However, since ImageNet is quite large, this requires a lot of disk
space and time. If you already have ImageNet on your disk, you can speed things
up by putting the data into
${XDG_CACHE}/autoencoders/data/ILSVRC2012_{split}/data/ (which defaults to
~/.cache/autoencoders/data/ILSVRC2012_{split}/data/), where {split} is one
of train/validation. It should have the following structure:
${XDG_CACHE}/autoencoders/data/ILSVRC2012_{split}/data/
├── n01440764
│ ├── n01440764_10026.JPEG
│ ├── n01440764_10027.JPEG
│ ├── ...
├── n01443537
│ ├── n01443537_10007.JPEG
│ ├── n01443537_10014.JPEG
│ ├── ...
├── ...
If you haven't extracted the data, you can also place
ILSVRC2012_img_train.tar/ILSVRC2012_img_val.tar (or symlinks to them) into
${XDG_CACHE}/autoencoders/data/ILSVRC2012_train/ /
${XDG_CACHE}/autoencoders/data/ILSVRC2012_validation/, which will then be
extracted into above structure without downloading it again. Note that this
will only happen if neither a folder
${XDG_CACHE}/autoencoders/data/ILSVRC2012_{split}/data/ nor a file
${XDG_CACHE}/autoencoders/data/ILSVRC2012_{split}/.ready exist. Remove them
if you want to force running the dataset preparation again.
You will then need to prepare the depth data using
MiDaS. Create a symlink
data/imagenet_depth pointing to a folder with two subfolders train and
val, each mirroring the structure of the corresponding ImageNet folder
described above and containing a png file for each of ImageNet's JPEG
files. The png encodes float32 depth values obtained from MiDaS as RGBA
images. We provide the script scripts/extract_depth.py to generate this data.
Please note that this script uses MiDaS via PyTorch
Hub. When we prepared the data,
the hub provided the MiDaS
v2.0 version, but now it
provides a v2.1 version. We haven't tested our models with depth maps obtained
via v2.1 and if you want to make sure that things work as expected, you must
adjust the script to make sure it explicitly uses
v2.0!
CelebA-HQ
Create a symlink data/celebahq pointing to a folder containing the .npy
files of CelebA-HQ (instructions to obtain them can be found in the PGGAN
repository).
FFHQ
Create a symlink data/ffhq pointing to the images1024x1024 folder obtained
from the FFHQ repository.
S-FLCKR
Unfortunately, we are not allowed to distribute the images we collected for the
S-FLCKR dataset and can therefore only give a description how it was produced.
There are many resources on collecting images from the
web to get started.
We collected sufficiently large images from flickr
(see data/flickr_tags.txt for a full list of tags used to find images)
and various subreddits
(see data/subreddits.txt for all subreddits that were used).
Overall, we collected 107625 images, and split them randomly into 96861
training images and 10764 validation images. We then obtained segmentation
masks for each image using DeepLab v2
trained on COCO-Stuff. We used a PyTorch
reimplementation and include an
example script for this process in scripts/extract_segmentation.py.
COCO
Create a symlink data/coco containing the images from the 2017 split in
train2017 and val2017, and their annotations in annotations. Files can be
obtained from the COCO webpage. In addition, we use
the Stuff+thing PNG-style annotations on COCO 2017
trainval
annotations from COCO-Stuff, which
should be placed under data/cocostuffthings.
ADE20k
Create a symlink data/ade20k_root containing the contents of
ADEChallengeData2016.zip
from the MIT Scene Parsing Benchmark.
Training models
FacesHQ
Train a VQGAN with
python main.py --base configs/faceshq_vqgan.yaml -t True --gpus 0,
Then, adjust the checkpoint path of the config key
model.params.first_stage_config.params.ckpt_path in
configs/faceshq_transformer.yaml (or download
2020-11-09T13-33-36_faceshq_vqgan and place into logs, which
corresponds to the preconfigured checkpoint path), then run
python main.py --base configs/faceshq_transformer.yaml -t True --gpus 0,
D-RIN
Train a VQGAN on ImageNet with
python main.py --base configs/imagenet_vqgan.yaml -t True --gpus 0,
or download a pretrained one from 2020-09-23T17-56-33_imagenet_vqgan
and place under logs. If you trained your own, adjust the path in the config
key model.params.first_stage_config.params.ckpt_path of
configs/drin_transformer.yaml.
Train a VQGAN on Depth Maps of ImageNet with
python main.py --base configs/imagenetdepth_vqgan.yaml -t True --gpus 0,
or download a pretrained one from 2020-11-03T15-34-24_imagenetdepth_vqgan
and place under logs. If you trained your own, adjust the path in the config
key model.params.cond_stage_config.params.ckpt_path of
configs/drin_transformer.yaml.
To train the transformer, run
python main.py --base configs/drin_transformer.yaml -t True --gpus 0,
More Resources
Comparing Different First Stage Models
The reconstruction and compression capabilities of different fist stage models can be analyzed in this colab notebook.
In particular, the notebook compares two VQGANs with a downsampling factor of f=16 for each and codebook dimensionality of 1024 and 16384,
a VQGAN with f=8 and 8192 codebook entries and the discrete autoencoder of OpenAI's DALL-E (which has f=8 and 8192
codebook entries).


Other
- A video summary by Two Minute Papers.
- A video summary by Gradient Dude.
- A weights and biases report summarizing the paper by ayulockin.
- A video summary by What's AI.
- Take a look at ak9250's notebook if you want to run the streamlit demos on Colab.
Text-to-Image Optimization via CLIP
VQGAN has been successfully used as an image generator guided by the CLIP model, both for pure image generation from scratch and image-to-image translation. We recommend the following notebooks/videos/resources:
- Advadnouns Patreon and corresponding LatentVision notebooks: https://www.patreon.com/patronizeme
- The notebook of Rivers Have Wings.
- A video explanation by Dot CSV (in Spanish, but English subtitles are available)

Text prompt: 'A bird drawn by a child'
Shout-outs
Thanks to everyone who makes their code and models available. In particular,
- The architecture of our VQGAN is inspired by Denoising Diffusion Probabilistic Models
- The very hackable transformer implementation minGPT
- The good ol' PatchGAN and Learned Perceptual Similarity (LPIPS)
BibTeX
@misc{esser2020taming,
title={Taming Transformers for High-Resolution Image Synthesis},
author={Patrick Esser and Robin Rombach and Björn Ommer},
year={2020},
eprint={2012.09841},
archivePrefix={arXiv},
primaryClass={cs.CV}
}